液压挖掘机在工业与民用建筑、交通运输、水利施工、露天采矿及现代军事工程中都有广泛的应用,是各种土方施工中不可缺少的机械设备。
机电一体化液压挖掘机与传统的液压挖掘机相比具有下述新功能:
(1)自动操作
在计算机的直接操作下自动完成给定的挖掘任务,并具有一定的局部自主判断能力。即当阻力过大挖掘过程中断时,能自动修正挖掘路径,直到完成挖掘过程。在回转过程中,能自动识别和避开障碍物,达到原定的卸料位置。
(2)工况监测与故障报警
实时检测并显示挖掘机运行状态的各中参数。当检测到故障信号时,根据系统内的故障经验库,可以大致推断出故障所在,并同时报警。
(3)节能控制
合理调节柴油机工作油门开度,并适当调节变量泵排量,以适应各种不同负载工况,降低燃油消耗。
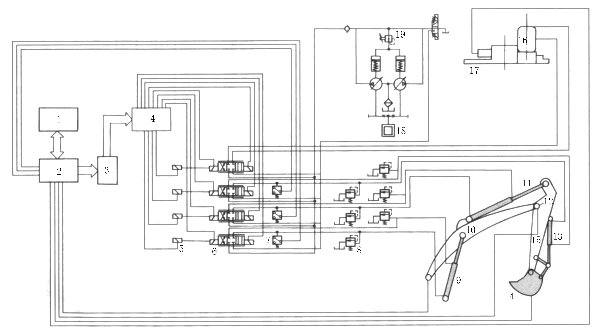
机电一体化液压挖掘机系统如图12-16所示,它主要由驱动与传动系统、执行机构、检测系统和控制系统四部分组成。
图12-16 机电一体化液压挖掘机系统原理图
1—PC;2—PCT-812;3—D/A接口;4—液压阀驱动放大器;5—位移传感器;6—电液比例方向阀;7—压力传感器;8—溢流阀;9—动臂缸;10—动臂;11—斗杆缸;12—角位移传感器;13—铲斗缸;14—铲斗;15—斗杆;16—液压马达;17—回转平台;18—柴油机;19—电液比例减压阀。
(1)驱动与传动系统
包括发动机、液压泵、液压马达、电液比例方向阀、动臂缸、斗杆缸、铲斗缸及齿轮传动,它实现了液压挖掘机中各种能量的传递和转换。
(2)执行机构
由回转平台、动臂、斗杆、铲斗及工作装置连杆机构组成。传动系统接到控制信号后,按要求推动执行机构,产生一定的动作,以完成一定的任务。
(3)检测系统
以各种传感器为主要组成部分,随时向计算机反馈挖掘机及环境的变化信息,包括:位置、姿态、速度、加速度、系统压力、柴油机水箱温度、柴油机转速以及外部环境的信息等。
(4)控制系统
由计算机根据任务要求,自动生成一条从初始状态到目标状态的安全运动路径,并由控制器控制挖掘机工作装置按照规划好的轨迹运行,直至达到给定的位置状态,完成给定的任务。
(1)采用了柴油机—液压泵复合控制,控制系统如图12-17所示。操作者根据工况,利用作业模式选择开关(功率预选开关)选择合理的功率模式:重载高速;正常工作;轻载低速。通过电子调节器调节发动机油门和液压泵的排量,使供给功率与负载需要功率相匹配。当选择重载高速档时,控制模块发出指令使柴油机在较大油门位置,与此同时,通过比例减压阀适当调节液压泵,使柴油机工作在最大功率输出点,功率得到充分发挥;当选择正常工作档时,柴油机在经济转速、液压泵在恒功率工作点上,此时为最经济工况;当选择轻载低速档时,比例减压阀将液压泵调至排量更小的位置,同时进一步调小柴油机油门,降低其转速,使供给流量明显降低。
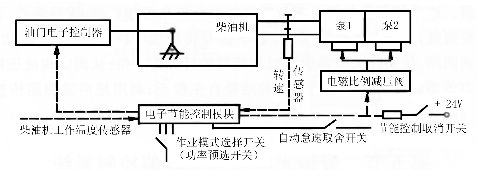
图12-17 柴油机—液压泵复合调节控制系统
(2)采用了电液比例控制技术,通过改变34B-R6/H6型阀芯位移反馈的电液比例方向阀的比例电磁铁的输入电流,不仅可以改变阀的工作液流方向,而且可以控制阀口大小实现流量控制,是一种较为理想的电、液转换和功率放大元件,与伺服控制相比具有成本低、抗干扰性好、能量损失小、对油液清洁度吴特殊要求等优点。
(3)工况在线检测系统包括单片主处理模块、面板控制模块、模拟信号调理模块、A/D转换及光电隔离模块、电源模块及传感器等部分,其框图如图12-18所示。
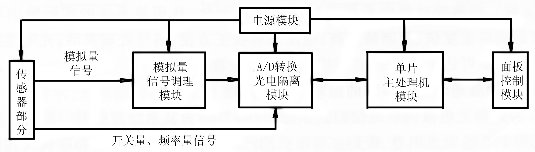
图12-18 工况检测系统框图
单片主处理模块是系统的核心部分,主要功能有面板的控制管理,A/D转换部分的控制管理,模拟量、开关量和转换信号的输入、处理和存储。
面板控制模块是整个系统的接入口,它包括键盘、声光报警电路和点阵式液晶显示器。
模拟信号调理电路的任务是实现各路模拟量信号的输入和调整、将传感器和敏感元件的输出电信号转变为满足A/D转换输入要求的标准电平信号。
A/D转换及光电隔离模块的功能是将所有的被检测信号转变为单片机所接受的数字量,具体包括开关量的采集、转速信号的整形、模拟量的A/D转换和输入输出的光电隔离等。
电源模块将液压挖掘机上的蓄电池或发电机输出的+24V直流电转换为系统各模块以及系统配备的传感器所需的各种类型的电平电压。
传感器处于液压挖掘机与检测系统的接口位置,是一个能量变换器,它直接从液压挖掘机中提取被检测的工况特征参数,感受状态的变换并转换为便于测量的物理量。挖掘机的位置转角由安装在回转平台、动臂、斗杆和铲斗关节的角位移传感器进行测量,液压系统的负载由安装在各液压缸(马达)进口的压力传感器测量;回转过程遇到的障碍物由安装在铲斗处的超声波测距传感器测量。
(4)计算机控制系统将来自各传感器的检测信息和外部输入命令进行集中、存储、分析加工,根据信息处理结果,按照一定的程序和节奏发出相应的指令控制整个系统有目的的运行。
目前国内已有机电一体化液压挖掘机的成熟产品,如湖南山河智能有限公司的SWEROB2009智能挖掘机,其主要特点为:
(1)基于人机工程的挖掘机智能仪表系统
能实时显示作业过程中工作装置的姿态与位置,有效的提高作业精度;具有辅助挖掘的作用;配备整机状态参数在线监视及故障报警功能。
(2)整机采用电液比例技术
采用LS系统,电液比例控制阀组,保证了运动控制的精度,具有良好的操控性。
(3)具有自学习功能的智能控制系统
具有多重控制模式,可在手动模式、遥控模式、自动模式之间可任意切换。并有在线自学习功能,可以在线学习操作手的动作,高精度的自动重复再现所有动作。
(4)无线遥控功能(>500米)
实现了可靠、高灵敏度无线遥控功能,遥控距离大于500米。
(5)远程数据及图像传输功能
实现了车载控制器与上位机的远程数据及图像的传输功能,具有良好的实时性和高可靠性。
(6)便捷的自动复位功能
可将工作装置的任意姿态记录作为初始位置,通过自动控制算法实现工作装置的自主复位,减少劳动强度,提高工作效率。
(7)完善可靠的自动保护功能