��2.2 �� �� ��
ǰ����ܵ�ֱ�ӷ����ڲ������������ʱ�����龫ȷ��ķ������������ַ��������Ĺ����У�ϵ������A�ڲ��ϵر䶯�����A�Ľ����ϴ�ʱ��ռ�ü�������ڴ�ͺܴ��ҳ���Ƚϸ��ӣ��Գ�����Ƶļ���Ҫ��Ҳ�ϸߣ���ˣ�����ϣ����һ�����������У�ԭʼϵ������A�ڼ��������ʼ�ղ��䣬�ҳ�������ֲ����ӵ���ⷽ�������ַ������ǵ������������Ǽ������ѧ�е�һ������Ҫ�أ�����ָ�����ظ�ִ��һ��������̣�ֱ���ҵ��𰸡������˵��������������ij�ּ�����ȥ�ƽ����Է����龫ȷ��ķ��������Ǵ�һ����ʼ����![]() ����������һ���ĵ�����ʽ����һ���������У�
����������һ���ĵ�����ʽ����һ���������У�![]() ����ʹ��������������Ax��b�⡣��������ԡ������Լ��ַ��̹����У������õ�����������
����ʹ��������������Ax��b�⡣��������ԡ������Լ��ַ��̹����У������õ�����������
�����ⷨ���ŵ������������洢��Ԫ�٣����Ƴ�����dz�������������ϡ��ϵ������ķ����飨�������ַ�����ɢ��õ��Ĵ��ͷ����飩���Ǽ�������õ��㷨֮һ�������������������Լ������ٶ����⡣�����Ƚ��ܵ������Ļ���˼�룬�ٽ��ܼ����ڽ����Է�����ʱ���õĵ���������Ҫ��Jacobi��������Gauss-Seidel��������SOR�����ɳۣ��������ȣ������������۵������������Ժ������ƣ��������жϵ��������ļ�������������
����n�����Է����飺Ax��b��ϵ������AΪ���������д������һ���ȼ���ʽ��x��Mx��g
������ʽ
�������x��һ��ֵ![]() ��Ϊ��ʼ���������루ʽ
��Ϊ��ʼ���������루ʽ![]() ���ٽ�
���ٽ�![]() ���루ʽ2.2.1�����ұߣ���õĽ����Ϊ
���루ʽ2.2.1�����ұߣ���õĽ����Ϊ![]() ��һ����У�
��һ����У�
![]() ��M
��M![]() ��g
��ʽ
��g
��ʽ
��ʽ��ΪAx��b�ĵ�����ʽ��M��Ϊ����������![]() �����õ��ĵ�������
�����õ��ĵ�������![]() ��
��![]() ����
����![]() ����м��ޣ�������xʹ��
����м��ޣ�������xʹ��![]() ����Ƶ�����ʽ��ʽ
����Ƶ�����ʽ��ʽ![]() ����˼��ָ
����˼��ָ![]() ��O
��O![]() ��Xi�O��0��i=1��2������n�����ڶԷ�����Ax��b���Թ���������ĵ�����ʽ�������ĵ�����ʽ�����ҵ�������ֻ�ܽ�����������ˣ��õ�����������Է�����ʱ�����������⣺
��Xi�O��0��i=1��2������n�����ڶԷ�����Ax��b���Թ���������ĵ�����ʽ�������ĵ�����ʽ�����ҵ�������ֻ�ܽ�����������ˣ��õ�����������Է�����ʱ�����������⣺
��1����ι���һ�������ĵ�����ʽ��
��2����ʱ��ֹ�����õ�����Ľ��ƽ⡣
�����Ƚ��ܼ��ֳ��õĵ�����ʽ��
�Ÿ��ȵ������ֳ�Ϊ�����������巽����ͨ���������������
���� ��������������
��������������
�����������ʾ��������ʽ
�������Ÿ��ȵ������� (ʽ
(ʽ
����ӳ�ʼ��![]() ��ʼ������
��ʼ������![]() ����(ʽ
����(ʽ![]() ��
��
![]() ��
��![]() ���µĵ�
���µĵ�![]() ��
��![]() ���ӽ�����ֵ��ʹ��(ʽ
���ӽ�����ֵ��ʹ��(ʽ![]() ����������
����������![]() ��
��
������̾ͳ�Ϊ�Ÿ��ȵ������������������ijЩ���͵����Է����顣��������һ�������
�������Ax��b������
A�� ��x��
��x��![]() ��b��
��b��![]()
AΪ���������AΪ������ʱ���ɼ�Ϊ��
A�� ��x��
��x��![]() ��b��
��b��![]()
����![]() ��0��r��1��2��3���
��0��r��1��2��3���![]() ����
����![]() ��
��![]() ��r��j��
��r��j��![]() ��
��![]() ��
��![]() ��
��
����![]() ��
��![]() ��
��![]() ��
��
![]() ��
��![]() ��
��![]() ��
��
����Ax��b����д�ɵ�����ʽ��
������Ÿ��ȵ�����ʽ�����ǣ�
C�� ��D��
��D�� ��g��
��g��![]()
��ΪA��D(E��C)������C��![]() (D��A)��E��
(D��A)��E��![]() A����g��
A����g��![]() b�������
b�������
C����![]() (D��A)
(D��A)
�� ������
������
�Ÿ��ȵ�����ʽ�����þ����ʾΪ��x(k+1)��Cx(k)��g�����е�������M��C��
���ѡȡ��ʼ����x(0)����x1(0)��x2(0)��x3(0)������ɵõ��������У�x(k)�������õ�������������x�����У�x��Cx��g����x��Cx��g���Ӷ�(E��C)x��g������ͬ�˾���D��D(E��C)��Dg����Ax��b��������������ĵ������еļ���x���Ƿ�����Ax��b�Ľ⡣
�е�ʱ���Ÿ��ȵ�����Ҳ����Ч���������С���![]() Ϊ��ʼ�㣬�����һ����ɢ�ĵ����С�
Ϊ��ʼ�㣬�����һ����ɢ�ĵ����С�
����
�⣺�Ÿ��ȵ�����ʽΪ��
������![]() ��
��![]() ��
��![]() ���Ժ������±�
���Ժ������±�
|
k |
xk |
yk |
zk |
|
0 |
1.0 |
2.0 |
2.0 |
|
1 |
-1.5 |
3.375 |
5.0 |
|
2 |
6.687 |
2.5 |
16.375 |
|
3 |
34.6875 |
8.015625 |
-17.25 |
|
4 |
-46.617188 |
17.8125 |
-123.73438 |
|
5 |
-307.929688 |
-36.150391 |
211.28125 |
|
6 |
502.62793 |
-124.929688 |
1202.56836 |
����������Զ���(2��4��3)��
�����n�����Է�����Ϊ��Ax��b����Jacobi�������ĵ�����ʽ���£�
 ��
�� ��
��![]() (ʽ
(ʽ
��֮��Ӧ��Jacobi������ʽ�ľ����ʾ��ʽΪ��x(k+1)��Mx(k)��g
���У�M��ΪJacobi��������M����![]() (L��U)��g=
(L��U)��g=![]() b��DΪ�ԽǾ���L��U�ֱ�Ϊ�ϸ������ǡ��ϸ������Ǿ��ݴˣ��Ϳ��Ա�дʵ��Jacobi��������M������������ʾ��
b��DΪ�ԽǾ���L��U�ֱ�Ϊ�ϸ������ǡ��ϸ������Ǿ��ݴˣ��Ϳ��Ա�дʵ��Jacobi��������M������������ʾ��
ykbdd.m
function s=ykbdd(a,b,x0,eps)
% jacobi�����������Է�����
%aΪϵ������bΪ������ax��b�е��ұߵľ���b��xoΪ������ֵ
If nargin����3
eps=1.0e-6;
elseif nargin<3
error
return
end
D=diag(diag(a)); %����ԽǾ���
D=inv(D);
%����ԽǾ������
L=tril(a,-1); %����ϸ������Ǿ���
U=triu(a,1); %����ϸ������Ǿ���
B=-D*(L+U);
f=D*b;
S=B*x0+f;
While norm��s��x0������eps
x0=S;
s=B*x0+f;
end
return
����
10xl��2x2��x3=3
��2x1��10x2��x3��15
��x1��2x2��5x3=10
��MATLAB��ʵ�֣�������ʾ��
A=[
b=[3 15 10]';
x0=[0 0 0]';
eps=0.0001;
s=ykbdd(A,b,x0,eps)
1��0000 2��0000
3��0000
����
b=[-2 -6 6 12]';
x=[0 0 0 0]';y=x;
for k=1:21
for m=1:4
s=x(m);x(m)=0;
y(m)=(b(m)-A(m,:)*x)/A(m,m);x(m)=s;
end
eorr=norm(y-x,inf);x=y,
end
x
��������������£�
x1 = -0.4000 -0.7500 -1.5000 1.7143
x2 = 0.1357 -1.1054 -1.6536 2.4071
x3 = 0.4532 -1.4799 -1.5152 2.6798
x 4= 0.6649 -1.6788 -1.3167 2.8462
x 5= 0.8109 -1.8190 -1.2059 2.9050
x 6= 0.8846 -1.8914 -1.1140 2.9542
x 7= 0.9372 -1.9397 -1.0717 2.9695
x 8= 0.9614 -1.9639 -1.0382 2.9857
x 9= 0.9794 -1.9802 -1.0241 2.9899
x 10= 0.9872 -1.9881 -1.0125 2.9955
x 11= 0.9933 -1.9935 -1.0080 2.9966
x 12= 0.9958 -1.9961 -1.0041 2.9986
x 13= 0.9978 -1.9979 -1.0027 2.9989
x 14= 0.9986 -1.9987 -1.0013 2.9995
x15 = 0.9993 -1.9993 -1.0009 2.9996
x16 = 0.9995 -1.9996 -1.0004 2.9999
x17 = 0.9998 -1.9998 -1.0003 2.9999
x18 = 0.9998 -1.9999 -1.0001 3.0000
x19 = 0.9999 -1.9999 -1.0001 3.0000
x20 = 0.9999 -2.0000 -1.0000 3.0000
x21 = 1.0000 -2.0000 -1.0000 3.0000
��ʱ����ͨ����������ʹ�����ٶȼӿ죬���Ÿ��ȵ�����ʽ�ԼӸĽ����Ϳɵõ�ʵ���ϸ�Ϊ��Ч�ļ��㹫ʽ��
�۲졾��![]() ��
��![]() ��
��![]() �ֱ�������2��4��3����˿�����Ϊ
�ֱ�������2��4��3����˿�����Ϊ![]() �DZ�
�DZ�![]() ���ӽ���ȷ��
���ӽ���ȷ��![]() �Ľ���ֵ�������ڼ���
�Ľ���ֵ�������ڼ���![]() ʱ����
ʱ����![]() ������
������![]() �Ǻ����ġ�ͬ������
�Ǻ����ġ�ͬ������![]() ��
��![]() ���ڼ���
���ڼ���![]() �������ȿ��Խ�ʡ�ڴ棬�ָ����Ƴ����������㡣������ˣ����ڵ�������
�������ȿ��Խ�ʡ�ڴ棬�ָ����Ƴ����������㡣������ˣ����ڵ�������![]() ������һ��أ�x(k+1)��x(k)���ӽ���ȷ�⣬��ˣ����ַ������Լӿ������ٶȡ����ַ���������ν��˹�����¶����������ּ��Ϊ���¶����������������ʽΪ��
������һ��أ�x(k+1)��x(k)���ӽ���ȷ�⣬��ˣ����ַ������Լӿ������ٶȡ����ַ���������ν��˹�����¶����������ּ��Ϊ���¶����������������ʽΪ��
 �� ��ʽ
�� ��ʽ
����AΪ��������ʽ�е�![]() ���Ÿ��ȵ�����ʽ�е�������ͬ��
���Ÿ��ȵ�����ʽ�е�������ͬ��
����C��L��U������L�� ��U��
��U��
�����¶��������̿��þ����ʾΪ��
![]() ��L
��L![]() ��U
��U![]() ��g k��1,2,3
��ʽ
��g k��1,2,3
��ʽ
����E��L���棬�ұߵ�һ�������ͬ��E��L�������ɵã�
![]() ��
��![]() U
U![]() )��
)��![]() g
g
![]() ��1,2,3
��1,2,3
����M��![]() U��Ϊ���¶��������ĵ�������Ӧ��ע����ǣ����������̺�δ֪����˳��ʱ������Ӱ�쵽���¶��������ļ�������
U��Ϊ���¶��������ĵ�������Ӧ��ע����ǣ����������̺�δ֪����˳��ʱ������Ӱ�쵽���¶��������ļ�������
%
��˹�������¶�����������
A=[5
for
k=1:10
eorr=0;
for
m=1:4
s=x(m);x(m)=0;
x(m)=(b(m)-A(m,:)*x)/A(m,m);
erro=max(abs(s-x(m)),eorr);
end
x',pause,eorr
end
ans = -0.4000 -0.6500 -1.2750 2.3000
0.3950 -1.5519 -1.2003 2.7788
0.7818 -1.8374 -1.0805 2.9222
0.9203 -1.9408 -1.0301 2.9718
0.9709 -1.9784 -1.0110 2.9897
0.9894 -1.9921 -1.0040 2.9963
0.9961 -1.9971 -1.0015 2.9986
0.9986 -1.9989 -1.0005 2.9995
0.9995 -1.9996 -1.0002 2.9998
0.9998 -1.9999 -1.0001 2.9999
0.9999 -1.9999 -1.0000 3.0000
1.0000 -2.0000 -1.0000 3.0000
 ʹ���������֪������˵�������Է������Gauss-Seidel������һ������ʧ��һ�����εĶ�ͨ���Թ��У���ÿһ������㴦�������ѡ��һ������ǰ������һ������㣬���Ƕ����������ѡһ������ȵȡ�һ�����ӽ���㴦�������ճ���������߽��ϵĸ����Ƕ��٣�
ʹ���������֪������˵�������Է������Gauss-Seidel������һ������ʧ��һ�����εĶ�ͨ���Թ��У���ÿһ������㴦�������ѡ��һ������ǰ������һ������㣬���Ƕ����������ѡһ������ȵȡ�һ�����ӽ���㴦�������ճ���������߽��ϵĸ����Ƕ��٣�
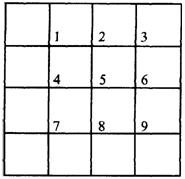
�ٶ�ǡ���� 9���ڲ�����㣬��ͼ��ʾ��
��P1�������ӵ�һ�������������ճ�������
���ϵĸ��ʣ���P2����P9���Ƶر����塣����
�ڵ����ÿ������㣬���ȿ��ܵ�����ѡһ��
��������ֻҪ���������κ�һ����������
�ζ��������������������ΪPk��������9
�����̣�![]() ��
��
![]() ��
��![]() ��
��
![]() ��
��![]() ��
��
![]() ��
��![]() ��
��
![]() ��
��![]()
�������̵�������ʽ������ѡ��Pk�ij�ʼ�ƽ�ֵ�������п����������ǵIJ��룬�����Լٶ������е�k����ȡ����ƽ���ij�ʼֵPk��0�����г���˳��ȡ���̣���������ؼ���ڶ��εıƽ�ֵ������P1�����Ϊ�㡣����P2������P6Ҳ��ˡ�������֮�����ǵõ���![]() ��
��![]() ��
��![]() ������ÿ��Pk�ĵڶ��αƽ�ֵ�����ˡ�ע���ڼ���P8��P9ʱ�ֱ��õ�P7��P8�����±ƽ�ֵ������ʹ����Щʱ�ıƽ�ֵ���岻�������ʹ������ֵ�ģ����̸���ص�����ȷ�����������ͬ���ķ�ʽ��εõ��ƽ�ֵ����������������Ҫ���С��λ�����ֽ�һ���ı仯Ϊֹ��������3λ���õ��±��еĽ����ע�������P5Ϊ0.250������ζ�Ŵ����ij����Ĺ�֮����1/4�����������ı߽��ϡ��ӶԳ��ԵĽǶȣ����Ǻ����ġ����Խ����е�9��ֵ�Ĵ���ԭʼ��������һ�����飬����������Ƿ���С������MATLAB������£�
������ÿ��Pk�ĵڶ��αƽ�ֵ�����ˡ�ע���ڼ���P8��P9ʱ�ֱ��õ�P7��P8�����±ƽ�ֵ������ʹ����Щʱ�ıƽ�ֵ���岻�������ʹ������ֵ�ģ����̸���ص�����ȷ�����������ͬ���ķ�ʽ��εõ��ƽ�ֵ����������������Ҫ���С��λ�����ֽ�һ���ı仯Ϊֹ��������3λ���õ��±��еĽ����ע�������P5Ϊ0.250������ζ�Ŵ����ij����Ĺ�֮����1/4�����������ı߽��ϡ��ӶԳ��ԵĽǶȣ����Ǻ����ġ����Խ����е�9��ֵ�Ĵ���ԭʼ��������һ�����飬����������Ƿ���С������MATLAB������£�
0.0714 0.0982 0.0714 0.1875 0.2500 0.1875 0.4286 0.5268 0.4286
��Gauss-Seidel�����������ɵ����¼������ݣ�
|
k |
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
P7 |
P8 |
P9 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0.25 |
0.312 |
0.328 |
|
2 |
0 |
0 |
0 |
0.062 |
0.078 |
0.082 |
0.328 |
0.394 |
0.328 |
|
3 |
0.016 |
0.024 |
0.027 |
0.106 |
0.152 |
0.127 |
0.375 |
0.464 |
0.398 |
|
4 |
0.032 |
0.053 |
0.045 |
0.140 |
0.196 |
0.160 |
0.401 |
0.499 |
0.415 |
|
5 |
0.048 |
0.072 |
0.058 |
0.161 |
0.223 |
0.174 |
0.415 |
0.513 |
0.422 |
|
6 |
0.058 |
0.085 |
0.065 |
0.174 |
0.236 |
0.181 |
0.422 |
0.520 |
0.425 |
|
7 |
0.065 |
0.092 |
0.068 |
0.181 |
0.244 |
0.184 |
0.425 |
0.524 |
0.427 |
|
8 |
0.068 |
0.095 |
0.070 |
0.184 |
0.247 |
0.186 |
0.427 |
0.525 |
0.428 |
|
9 |
0.070 |
0.097 |
0.071 |
0.186 |
0.245 |
0.187 |
0.428 |
0.526 |
0.428 |
|
10 |
0.071 |
0.098 |
0.071 |
0.187 |
0.250 |
0.187 |
0.428 |
0.526 |
0.428 |
��Gauss-Seidel��������һ������9�������е�ÿһ�������������ʽ���֣�
Pi�����������Դ���ʽ��У����ֻ�ıƽ����õ�������������������ֵ��ֵ��ע�������ÿ����������ߵ��Ǹ�δ֪��������ϵ����